Wickert introduces multifunctional gripper for multi-layer components
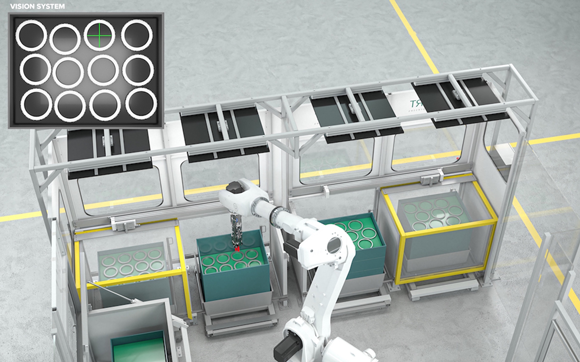
Wickert Maschinenbau GmbH, Laundau, German, has developed a compact, setup-free, multifunctional gripper for the handling of multilayer-stacked or chaotically-deposited components with layer separation. Due to its flexibility, the multifunctional gripper is suited to a variety of different applications throughout handling, automation and machining operations.
The system is able to decide on the suitability of workpieces for further processing, via a plausibility check, and components that are unsuitable or falsely gripped are detected and do not undergo further processing.
The gripper utilises two to six fingers with variable lift ranges to pick up workpieces and lift them out of the transport container. As soon as one layer has been completely emptied, the separation sheet is removed by three close-fitting, extendable vacuum suction elements on the gripper arm. The system is then able to access the next level of components.
The multifunctional gripper can be used without additional programming: the diameter of the gripped component is permanently monitored by a position sensor system and the PLC compares this value with the gripper diameter, which also has a tolerance range configured in a ‘recipe’ stored centrally in the PLC.
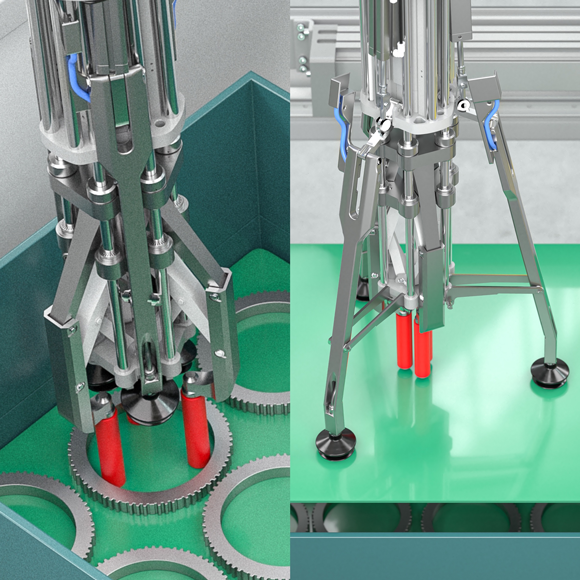
The standard version of the gripper arm has a height of 730 mm and, with a diameter of just 160 mm, the gripper is still able to precisely pick and place small components even when they are tightly packed on a pallet, or located in the corners of pallets. If a workpiece has slipped into a position that is not accessible to the gripper, the fingers are able to move it back into a position where it can be reached.
The surfaces which come into contact with the parts needed to be gripped are equipped with a wear-resistant rubber coating which ensures a high friction value. In accordance with individual requirements, the gripper pressure can be set individually to a value between 460 N and 3000 N, aiding in safe grips on both heavy and light, delicate components. As an option, the gripper fingers can also be fitted with an interlocking under-grip.
In the standard version, the gripper is designed for rotation-symmetrical workpieces with inside diameters from 40 mm to 256 mm and weights from 100 g to 20 kg. For other requirements, the parameters can be configured individually. Grippers with larger arms, for combined outside and inside gripping, are also available.
With the use of cameras, image processing and an integrated position sensor system, the gripper detects both the inside diameter and position of components. It also monitors the remaining quantities and detects when a layer of components is empty.